Loading... # Lecture 1 信号与系统 ## 1.1信号的种类 - 离散时间信号$x[n]$ - 连续时间信号$x(t)$ ### 周期信号&非周期信号 $$ x[n]=x[n+T]\\ x(t)=x(t+T) $$ ### 信号的奇偶性 - 奇信号$x[n]=-x[-n]$ - 偶信号$x[n]=x[-n]$ #### 任何信号都能被分解成两个信号之和 $$ x[n]=\mathcal{Ev}\{x[n]\}+\mathcal{Od}{}\{x[n]\}\\ x[-n]=\mathcal{Ev}\{x[-n]\}+\mathcal{Od}{}\{x[-n]\}=-\mathcal{Ev}\{x[n]\}+\mathcal{Od}{}\{x[n]\} $$ $$ \Longrightarrow\mathcal{Ev}\{x[n]\}=\frac{1}2[x[n]+x[-n]],\mathcal{Od}\{x[n]\}=\frac12[x[n]-x[-n]] $$ #### 乘积 - 奇$\times$奇=偶 - 偶$\times$偶=偶 - 奇$\times$偶=奇 #### 积分 $x(t)$是奇信号$\Rightarrow \displaystyle s=\int^T_{-T}r(t)dt$ ### 信号的功率和能量 #### 有限时间的信号 连续时间信号$x(t)$ - 总能量: $$ E=\int^{t_2}_{t_1}|x(t)|^2dt $$ - 时间上的平均功率 $$ P=\frac{E}{t_2-t_1} $$ 离散时间信号$x[n]$ - 总能量: $$ E=\sum^{n_2}_{n=n_1}|x(n)|^2 $$ - 平均功率 $$ P=\frac{E}{n_2-n_1+1} $$ #### 无限时间的信号 连续时间信号$x(t)$ - 总能量: $$ E_{\infty}=\lim_{T\rightarrow\infty}\int^{T}_{-T}|x(t)|^2dt=\int^{\infty}_{-\infty}|x(t)|^2dt $$ - 时间上的平均功率 $$ P=\lim_{T\rightarrow\infty}\frac{1}{2T}\int^{T}_{-T}|x(t)|^2dt $$ 离散时间信号$x[n]$ - 总能量: $$ E=\lim_{N\rightarrow \infty}\sum^{N}_{n=-N}|x(n)|^2=\sum^{\infty}_{n=-\infty}|x(n)|^2 $$ - 平均功率 $$ P=\lim_{N\rightarrow\infty}\frac{E}{2N+1}\sum^{N}_{n=-N}|x(n)|^2 $$ ## 1.2信号变换 ### 1.2.1时移(time shift) $$ x[n]\rightarrow x[n-n_0]\\ x(t)\rightarrow x(t-t_0) $$ ### 1.2.2.时间反转(time reversal) $$ x[n]\rightarrow x[-n]\\ x(t)\rightarrow x(-t) $$ ### 1.2.3.时间尺度变换(time reversal) $$ x[n]\rightarrow x[an]\\ x(t)\rightarrow x(at) $$ 对于离散时间信号来说 $$ k = integer\Rightarrow \ Some\ values\ lost! $$ 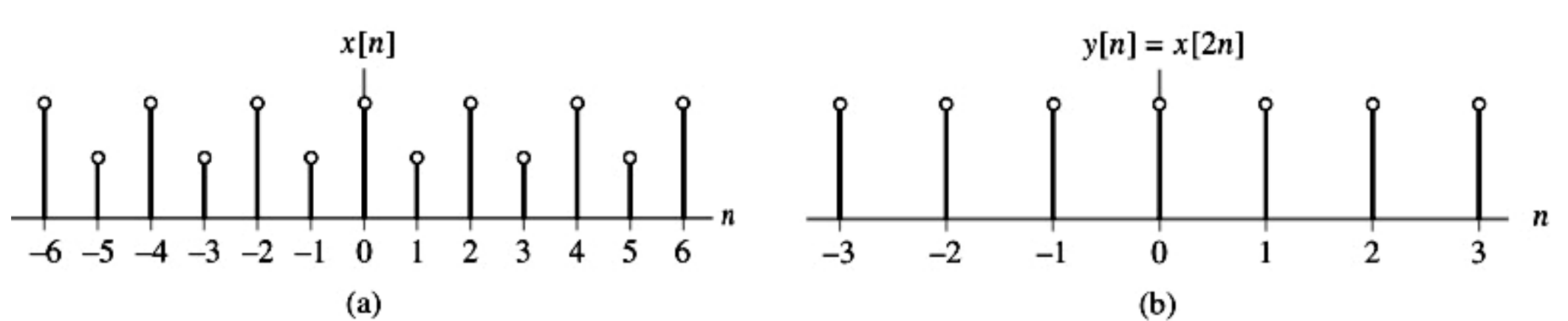 ### Total:时域变换 $$ x(t)\rightarrow x(at+\beta) $$ - $|\alpha|>1$,cpmpressed - If$|\alpha|<1$, stretched - If $\alpha<0$,reversed - If $\beta\neq 0$ ## 1.3指数信号 ### 1.3.1连续时间复指数信号 - 周期指数信号 $$ x(t)=e^{j\omega_0 t}\\ x(t+T)=e^{j\omega_0 (t+T)}=e^{j\omega_0 t}e^{j\omega_0 T} $$ $$ Acos(\omega_0t+\phi)=Re(Ae^{j\omega_0 t}) $$ - 一个周期上的总能量 $$ E_{period}=\int^{T_0}_0|e^{j\omega_0 t}|^2dt=\int^{T_0}_01dt=T_0 $$ - 平均功率 $$ P_{period}=\frac{T_0}{T_0}=1 $$ ### 1.3.2谐波关系的复指数信号 - 一组不同频率的周期信号($\omega_0是基波角频率$) $$ \phi_k(t)=e^{jk\omega_0 t},k=0,\pm 1,\pm 2 $$ where $\displaystyle\omega_0=\frac{2\pi}{T_0}$ ### 1.3.3连续时间一般指数信号 $$ x(t)=Ce^{at} $$ where $C$ and $\alpha$ are complex numbers $$ C=|C|e^{j\theta},\alpha=r+j\omega_0 $$ $$ Ce^{at}=|C|e^{j\theta},\alpha=|\alpha|e^{j\omega_0} $$ 则有 $$ C\alpha^n=|C||\alpha|^n\cos(\omega_0n+\theta)+j|C||\alpha|^n\sin (\omega_0 n+\theta) $$ ### 1.3.4离散时间的复指数信号 - 周期信号 $$ x[n]=e^{j\omega_0 n} $$ **定理:** $\omega_0$same value at $\omega_0$ and $\omega_0+2k\pi$ $$ e^{j(\omega_0+2k\pi)n}=e^{j2k\pi n}e^{j\omega_0 n}=e^{j\omega_0 n} $$ 只考虑区间 $0\leq \omega_o\leq 2\pi$或者$-\pi \leq \omega_0 \leq \pi$ ### 1.3.5 离散时间三角信号的周期性质 对于一个离散时间的三角信号 $$ x[n]=e^{j\omega_0 n} $$ 它的周期是: $$ N=m\frac{2\pi}{\omega_0} $$ 其中$m,N$都是整数 ## 1.4单位冲激信号和单位阶跃信号 ### 连续时间单位冲激信号$\delta(t)$ $$ \delta_{\varepsilon}=\begin{cases} \frac1{\varepsilon}&0<t<\varepsilon\\ 0& otherwise \end{cases} $$ ### 狄拉克函数的性质 #### 1.挑选性 $$ \int^{\infty}_{-\infty}f(x)\delta(x)dx=f(0) $$ #### 2.存在n阶导数,一阶导数为奇函数 而$\delta$函数的$n$阶导数的定义是: 对于任何在$x=0$函数值连续的函数$f(x)$,有 $$ \int^{\infty}_{-\infty}f(x)\delta^{(n)}(x)=-f^{(n)}(0) $$ ### 连续时间单位阶跃信号$u(t)$ $$ u(t)=\begin{cases} 0&,t<0\\ 1&,t>0\\ \end{cases} $$ 其中$\delta(t)$是$u(t)$的导函数 ### 离散时间单位冲激函数$\delta[n]$ $$ \delta[n]=\begin{cases} 1&n=0\\ 0&n\neq 0 \end{cases} $$ ### 离散时间单位冲激函数$u[n]$ $$ u[n]=\sum^{+\infty}_{k=0}\delta[n-k]=\begin{cases}0&n<0\\1&n\geq 0\end{cases} $$ ## 1.5连续时间系统和离散时间系统 - 连续时间系统:$x(t)\rightarrow y(t)$ - 离散时间系统:$x[n]\rightarrow y[n]$ 系统表示一种输入输出关系,强调的是$x[n]\rightarrow y[n]$的映射,而不是强调$x[n]和n的关系$ **定义:** 例如$x[n]\rightarrow y[n]$和$x(t)\rightarrow y(t)$这样系统,称$y[n]=\mathcal T\{x[n]\},$$y(t)=\mathcal T\{x(t)\}$ ## 1.6基本系统性质 ### 1.6.1 有记忆系统和无记忆系统(memoryless) - **无记忆系统:** $n_0$时的$y[n]$只由$n_0$时刻的$x[n]$决定 ($y[n_0]$只由$x[n_0]$决定) 比如电阻系统$y(t)=Rx(t)$ - **有记忆系统:**为了得到$y[n]$的输出,必须要记住以前输出的值的系统 比如累加器: $$ y[n]=\sum^n_{k=-\infty}x[k]=y[n-1]+x[n] $$ 比如延迟单元: $$ y[n]=x[n-1] $$ 另外:上述例子是输出值只和输入输出的过去值有关的,输出值也可以和输入输出的将来值有关,例如: $$ y[n]=x[n]-x[n+1] $$ ### 1.6.2 可逆性(invertible)和可逆系统(inverse system) #### 可逆系统 一个例子是: $$ y(t)=2x(t) $$ 该可逆系统的逆系统是 $$ w(t)=\frac12y(t) $$ 另一个例子就是累加器 $$ y[n]=\sum^n_{k=-\infty}x[k]=y[n-1]+x[n] $$ 它的可逆系统就是 $$ x[n]=y[n]-y[n-1] $$ #### 不可逆系统 例子1: $$ y[n]=0 $$ 该系统对任意$x[n]$的$y[n]$都为0 另外还有 $$ y(t)=x^2(t) $$ 无法根据输出来判断$x(t)$的正负号 ### 1.6.3因果性(causal) 如果一个系统在任何时刻的输出只取决于现在的输入已经过去的输入,该系统就称为**因果系统** 例如这样的是非因果系统 $$ y(t)=x(t+1)\\ y[n]=x[n]-x[n-1] $$ 但是,不会因为将来无法预测导致现实世界没有非因果系统,因为在图像处理,声音处理中,所谓”将来“的数据已经被提前记录好了,再通过取平均进行平滑处理 $$ y[n]=\frac{1}{2M+1}\sum^{+M}_{k=-M}x[n-k] $$ 另外,**无记忆系统**一定是**因果系统** - $y(t)=x(t)cos(t+1)$ ### 1.6.4 稳定性(stability) 一个稳定系统,若其输入是有界的,则系统的输出**必须**是有界的 对于累加器 $$ y[n]=\sum^n_{k=-\infty}x[k] $$ $y[n]$是无界的 ### 1.6.5 时不变性 系统的特性和行为不随时间而改变的性质叫做时不变性。 判定方法:若$y(t)=\mathcal T\{x(t)\}$有$y(t-t_0)=\mathcal T\{x(t-t_0)\}$,则系统$\mathcal T$是时不变系统 例如: - 时变系统 $y[n]=nx[n]$ - 时不变系统 $y(t)=sin[x(t)]$ ## 1.6.6 线性 一个线性的系统满足两个条件: - 可加性(additivity) :$y_1(t)+y_2(t)$是对$x_1(t)+x_2(t)$的响应 即$y_1(t)+y_2(t)=\mathcal T\{x_1(t)+x_2(t)\}$ - 比例性(scaling)或者称为齐次性(homogeneity): $ay_1(t)$是对$ax_1(t)$的响应,此处a为任意复常数$ay_1(t)=\mathcal T\{ax_1(t)\}$ 上面的两个性质合并后称为叠加性: $$ x[n]=\sum_{k}a_kx_k[n] $$ 的响应是: $$ y[n]=\sum_ka_ky_k[n] $$ 即若$y_1(t)=\mathcal T\{x_1(t)\},y_2(t)=\mathcal T\{x_2(t)\}$,有: $$ ay_1(t)+by_2(t)=\mathcal{T}\{ax_1(t)+bx_2(t)\} $$ 例如: $$ y(t)=x^2(t) $$ 是一个非线性的系统 # Lecture 2 线性时不变系统 ## 2.1离散时间线性时不变系统:卷积和 ### 2.1.1用脉冲表示离散时间信号 离散时间单位冲激函数$\delta[n]$ $$ \delta[n]=\begin{cases} 1&n=0\\ 0&n\neq 0 \end{cases} $$ 任何一个离散时间信号$x[n]$都可以写成这种形式 $$ x[n]=\sum^{\infty}_{k=-\infty}x[k]\delta[n-k] $$ ### 2.1.2离散时间线性时不变的单位脉冲响应和卷积和表示 设$\mathcal T:x[n]\rightarrow y[n]$是一个线性时不变系统 $$ y[n]=\mathcal{T}(x[n]) $$ 把$\displaystyle x[n]=\sum^{\infty}_{k=-\infty}x[k]\delta[n-k]$代入 $$ y[n]=\mathcal{T}(\sum^{\infty}_{k=-\infty}x[k]\delta[n-k])\\ =\sum^{\infty}_{k=-\infty}x[k]\mathcal{T}(\delta[n-k]) $$ 设**单位冲激响应**$h[n-k]=\mathcal{T}(\delta[n-k])$ $$ y[n]=\sum^{\infty}_{k=-\infty}x[k]h[n-k] $$ 这个结果被记为**卷积和** $$ y[n]=x[n]*h[n] $$ 因此我们发现任何一个LTI系统都可以有这样一种表示方式,其中$h[n]$被称为**单位冲激响应** ## 2.2 连续时间线性时不变系统:卷积积分 $$ \delta_{\varepsilon}=\begin{cases} \frac1{\varepsilon}&0<t<\varepsilon\\ 0& otherwise \end{cases} $$ 任何一个连续时间信号$x[t]$都可以写成这种形式 $$ x(t)=\int^{\infty}_{-\infty}x(\tau)\delta(t-\tau)d\tau $$ $$ y(t)=\mathcal{T}(\int^{\infty}_{-\infty}x(t)\delta(t-\tau)d\tau)\\ =\int^{\infty}_{-\infty}x(\tau)\mathcal{T}(\delta(t-\tau))d\tau $$ 设$h[t-\tau]=\mathcal{T}(\delta[t-\tau])$ $$ y(t)=\int^{\infty}_{-\infty}x(t)h(t-\tau) $$ 这个结果被记为**卷积和** $$ y(t)=x(t)*h(t) $$ ## 2.3 线性时不变系统的性质Properties of LTI systems ### 2.3.1(可交换性)The Commutative Property #### 离散时间 $$ x[n] * h[n]=h[n] * x[n] $$ Proof: $$ x[n] * h[n]=\sum_{k=-\infty}^{\infty} x[k] h[n-k]=\sum_{m=-\infty}^{n-k} h[m] x[n-m]=h[n] * x[n] $$ #### 连续时间 $$ x(t) * h(t)=h(t) * x(t) $$ Proof: $$ x(t) * h(t)=\int_{-\infty}^{\infty} x(\tau) h(t-\tau) d \tau=\int_{-\infty}^{t-\tau} h\left(\tau^{\prime}\right) x\left(t-\tau^{\prime}\right) d \tau^{\prime}=h(t) * x(t) $$ ## 2.3.2分配律 - 离散时间 $$ x[n] *\left(h_1[n]+h_2[n]\right)=x[n] * h_1[n]+x[n] * h_2[n] $$ - Proof: $$ \begin{gathered} x[n] *\left(h_1[n]+h_2[n]\right)=\sum_{k=-\infty}^{\infty} x[k]\left(h_1[n-k]+h_2[n-k]\right) \\ =\sum_{k=-\infty}^{\infty} x[k] h_1[n-k]+\sum_{k=-\infty}^{\infty} x[k] h_2[n-k] \\ =x[n] * h_1[n]+x[n] * h_2[n] \end{gathered} $$ - 连续时间 $$ x(t) *\left(h_1(t)+h_2(t)\right)=x(t) * h_1(t)+x(t) * h_2(t) $$ - Proof: $$ \begin{aligned} x(t) *\left(h_1(t)+\right. & \left.h_2(t)\right)=\int_{-\infty}^{\infty} x(\tau)\left(h_1(t-\tau)+h_2(t-\tau)\right) d \tau \\ & =\int_{-\infty}^{\infty} x(\tau) h_1(t-\tau) d \tau+\int_{-\infty}^{\infty} x(\tau) h_2(t-\tau) d \tau \\ & =x(t) * h_1(t)+x(t) * h_2(t) \end{aligned} $$ ## 2.3.3可结合性(结合律)The Associative Property - 离散时间 $$ \begin{aligned} & x[n] *\left(h_1[n] * h_2[n]\right)=\left(x[n] * h_1[n]\right) * h_2[n] \\ \end{aligned} $$ - proof $$ \begin{aligned} & y[n]=h_1[n] * h_2[n]=\sum_{m=-\infty}^{\infty} h_1[m] h_2[n-m] \\ & x[n] *\left(h_1[n] * h_2[n]\right)=x[n] * y[n] \\ & =\sum_{k=-\infty}^{\infty} x[k] y[n-k]=\sum_{k=-\infty}^{\infty} x[k] \sum_{m=-\infty}^{\infty} h_1[m] h_2[n-k-m] \\ & \text { Let } k+m=l \\ & =\sum_{k=-\infty}^{\infty} x[k] \sum_{l=-\infty}^{\infty} h_1[l-k] h_2[n-l] \\ & =\sum_{l=-\infty}^{\infty} \sum_{k=-\infty}^{\infty} x[k] h_1[l-k] h_2[n-l] \\ & =\sum_{l=-\infty}^{\infty}\left(x[l] * h_1[l]\right) h_2[n-l]=\left(x[n] * h_1[n]\right) * h_2[n] \\ & \end{aligned} $$ - 连续时间 $$ x(t) *\left(h_1(t) * h_2(t)\right)=\left(x(t) * h_1(t)\right) * h_2(t) $$ Proof: $$ \begin{aligned} x(t) *\left(h_1(t) * h_2(t)\right) & =x(t) * \int_{-\infty}^{\infty} h_1(\tau) h_2(t-\tau) d \tau \\ = & \int_{-\infty}^{\infty} x\left(\tau^{\prime}\right) \int_{-\infty}^{\infty} h_1(\tau) h_2\left(t-\tau^{\prime}-\tau\right) d \tau d \tau^{\prime} \\ \text { Let } \tau^{\prime}+\tau=\tau^{\prime \prime} & =\int_{-\infty}^{\infty} x\left(\tau^{\prime}\right) \int_{-\infty}^{\infty} h_1\left(\tau^{\prime \prime}-\tau^{\prime}\right) h_2\left(t-\tau^{\prime \prime}\right) d \tau^{\prime \prime} d \tau^{\prime} \\ & =\int_{-\infty}^{\infty} \int_{-\infty}^{\infty} x\left(\tau^{\prime}\right) h_1\left(\tau^{\prime \prime}-\tau^{\prime}\right) d \tau^{\prime} h_2\left(t-\tau^{\prime \prime}\right) d \tau^{\prime \prime} \\ & =\int_{-\infty}^{\infty} x\left(\tau^{\prime \prime}\right) * h_1\left(\tau^{\prime \prime}\right) h_2\left(t-\tau^{\prime \prime}\right) d \tau^{\prime \prime} \\ & =\left(x(t) * h_1(t)\right) * h_2(t) \end{aligned} $$ ## 2.3.4可逆性 假设LTI系统是可逆的,则存在一个系统(a)  然后我们发现系统(a)和系统(b)是一样的 $$ x(t)*h(t)*h_1(t)=x(t) $$ 根据可结合性 $$ x(t)*(h(t)*h_1(t))=x(t) $$ 又因为 $$ x(t)*\delta (t)=x(t) $$ 所以有 $$ h(t)*h_1(t)=\delta (t) $$ ## 2.3.5记忆性 - A system is memoryless if its output at any time depends only on the value of the input at that same time. - Discrete-time system without memory only if $$ h[n]=0 \text { for all } n \neq 0 $$ - Continuous-time system without memory only if $$ h(t)=0 \text { for all } t \neq 0 $$ ## 2.3.6因果性 因为LTI系统可以写成 $$ y[n]=\sum_{k=-\infty}^\infty x[k] h[n-k]=\sum_{k=-\infty}^{\infty} h[k] x[n-k] $$ 一个因果系统不能有任何$x[n](n>k)$所以这个冲激响应满足: For a discrete-time LTI system to be casual, $y[n]$ must not depend on $x[k]$ for $k>n$. Hence, the impulse response $$ h[n]=0 \text { for } n<0 $$ Thus, convolution sum $$ y[n]=\sum_{k=-\infty}^n x[k] h[n-k] $$ or equivalently $$ y[n]=\sum_{k=0}^{\infty} h[k] x[n-k] $$ ## 2.3.7稳定性Stability - A system is stable if every bounded input produces a bounded output. - A discrete LTI system is stable if and only if $h[n]$ is absolutely summable(绝对可和) $$ \sum_{k=-\infty}^{\infty}|h[k]|<\infty \quad \text { absolutely summable } $$ - A continuous LTI system is stable if and only if $h(t)$ is absolutely integrable(绝对可积) $$ \int_0^{\infty}|h(\tau)| d \tau<\infty \quad \text { absolutely integrable } $$ ### 2.3.8线性时不变系统的单位阶跃响应$s[n]$ - 单位阶跃响应$s(t)$ or $s[n]$, corresponding to the output with input $x(t)=u(t)$ or $x[n]=u[n]$. $$ u[n] \text { or } u(t) \longrightarrow \text { LTI } s[n] \text { or } s(t) $$ #### 离散时间下 $$ s[n]=u[n] * h[n]=\sum_{k=-\infty}^{\infty} h[k] u[n-k]=\sum_{k=-\infty}^n h[k] $$ - $h[n]$ 也可以用$s[n]$ 来表示 $$ h[n]=s[n]-s[n-1] $$ 因此我们发现离散时间下,单位冲激响应是单位阶跃响应的差分,单位阶跃响应是单位冲激响应的积分 #### 连续时间下 $$ s(t)=u(t) * h(t)=\int_{-\infty}^{\infty} h(\tau) u(t-\tau)d\tau = \int_{-\infty}^t h(\tau)d\tau $$ 于是$h(t)$是$s(t)$的微分 ## 2.4 用微分方程和差分方程描述一个因果性的线性时不变系统 $$ \sum_{k=0}^N a_k \frac{d^k y(t)}{d t^k}=\sum_{k=0}^M b_k \frac{d^k x(t)}{d t^k} $$ - 特解+通解: $y(t)=y_p(t)+y_h(t)$ $$ \begin{aligned} & y_p(t) \text { : 受迫响应(same form as input)零状态响应 } \\ & y_h(t) \text { : 自然响应} \sum_{k=0}^N a_k \frac{d^k y(t)}{d t^k}=0零输入响应 \end{aligned} $$ - 初始松弛条件, that is if $x(t)=0$ for $t \leq$ $t_0$ $$ y\left(t_0\right)=\frac{d y\left(t_0\right)}{d t}=\cdots=\frac{d^{N-1} y\left(t_0\right)}{d t^{N-1}}=0 $$ # Lecture 3 周期信号的傅里叶表示 ## 3.1线性时不变系统对复指数信号的响应 ### 特征函数 一个信号的输出响应如果是一个常数(振幅因子)$H(s)$乘以输入,那么这个输入被称为系统的**特征函数**,而幅度因子称为系统的**特征值** #### 连续时间的响应: 从第二章我们了解到:任意一个线性时不变系统对输入信号的响应都可以写成卷积和的形式: $$ y(t)=x(t)*h(t) $$ 若$x(t)=e^{st}$ $$ y(t)=\int^{\infty}_{-\infty}h(\tau)x(t-\tau)d\tau\\ =\int^{\infty}_{-\infty}h(\tau)e^{s(t-\tau)}d\tau\\ =e^{st}\int^{\infty}_{-\infty}h(\tau)e^{-s\tau}d\tau $$ 设$H(s)=\int^{\infty}_{-\infty}h(\tau)e^{-s\tau}d\tau$ $$ y(t)=H(s)e^{st} $$ 这说明: 复指数是线性时不变系统的特征函数,对于某一给定的$s$值,常数$H(s)$就是与特征函数$e^{st}$有关的特征值 ### 离散时间的响应: 设$x[n]=z^n$,其中$z=e^{s}$是复数 $$ y[n]=\sum^{\infty}_{k=-\infty}h[k]x[n-k]\\ =\sum^{\infty}_{k=-\infty}h[k]z^{n-k}\\ =z^n\sum^{\infty}_{k=-\infty}h[k]z^{-k} $$ $\displaystyle H(z)=\sum^{\infty}_{k=-\infty}h[k]z^{-k},x[n]=\sum_ka_k z_k^n$ $$ y[n]=\sum_{k}a_kH(z_k)z^n $$ 其中$z=e^{j\omega}$ ## 3.2连续时间周期信号的傅里叶级数表示 ### 3.2.1 成谐波关系的复指数信号的线性组合--傅里叶级数 如果一个信号是周期信号,则对所有的t,存在某个正值的T,有 $$ x(t)=x(t+t),\forall t $$ 我们知道有复指数信号$e^{jw_0t}$是周期的,这是个基波,基波频率$\omega_0$,基波周期$T=\frac{2\pi}{\omega_0}$,成谐波关系的复指数信号集是: $$ e^{jk\omega_0 t}=e^{jk(\frac{2\pi}T)t},k=0,\pm 1,\pm 2\cdots $$ $$ x(t)=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t} $$ 该信号由基波分量,一次谐波分量,二次谐波分量.....组成,总周期仍然是T 该形式被称为是**傅里叶级数** 傅里叶级数有三种形式 $$ \begin{align*} x(t)&=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t}\\ x(t)&=a_0+2\sum^{\infty}_{k=1}A_kcos(k\omega_0t+\theta_k)\\ x(t)&=a_0+2\sum^{\infty}_{k=1}[B_kcosk\omega_0t-C_ksink\omega_0t] \end{align*} $$ $$ x(t)=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t}=\sum^{\infty}_{k=-\infty}a^*_ke^{-jk\omega_0t}\xlongequal{k=-k}\sum^{\infty}_{k=-\infty}a^*_{-k}e^{jk\omega_0t} $$ 因此 $$ a_k=a_{-k}^* $$ 代入上面式子 $$ \begin{align*} x(t)&=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t}\\ &=a_0+\sum^\infty_{k=1}[a_ke^{jk\omega_0t}+a_{-k}e^{-j\omega_0 t}]\\ &=a_0+\sum^\infty_{k=1}[a_ke^{jk\omega_0t}+a_{k}^*e^{-j\omega_0 t}]\\ \end{align*} $$ 因为括号里面共轭,于是 $$ x(t)=a_0+\sum^{\infty}_{k=1}2Re\{a_ke^{jk\omega_0t} \} $$ 既然$a_k$是一个复数$a_k=A_k e^{j\theta_k}$ 即 $$ x(t)=a_0+2\sum^{\infty}_{k=1}A_kcos(k\omega_0t+\theta_k) $$ 或者 $$ x(t)=a_0+2\sum^{\infty}_{k=1}[B_kcosk\omega_0t-C_ksink\omega_0t] $$ ### 3.2.2 连续时间周期信号的傅里叶级数表示的确定(求$a_n$) $$ \begin{align*} x(t)e^{-jn\omega_0 t}&=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t}e^{-jn\omega_0t}\\ &=\sum^{\infty}_{k=-\infty}a_ke^{j(k-n)\omega_0t} \end{align*} $$ 对其积分 $$ \begin{align*} \int^T_0 x(t)e^{-jn\omega_0 t}&=\int^T_0\sum^{\infty}_{k=-\infty}a_ke^{j(k-n)\omega_0t}\\ &=\sum^{\infty}_{k=-\infty}\int^T_0a_ke^{j(k-n)\omega_0t}\\ \end{align*} $$ 因为 $$ \sum^{\infty}_{k=-\infty}\int^T_0e^{j(k-n)\omega_0t}=\begin{cases} T,&k=n\\ 0,&k\neq n \end{cases} $$ $$ \begin{align*} \int^T_0 x(t)e^{-jn\omega_0 t}&=T a_n\\ a_n &=\frac{1}{T}\int^T_0 x(t)e^{-jn\omega_0 t} \end{align*} $$ ## 3.3 傅里叶级数的收敛 ### 狄利克雷定理(数学分析) 设函数$f(x)$以$T$为周期,可积且绝对可积 1.如果在任何有限区间上面函数是逐段光滑的,那么它的Fourier级数在整个数轴上都收敛,且 $$ \sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t}=\frac{A_0}{2}+\sum^\infty_{n=1}(B_ncosnx+C_nsinnx)=\frac{f(x+0)+f(x-0)}{2}\\(左极限和右极限的平均值) $$ 2.如果$f(x)$处处连续,且在任何有限区间逐段光滑(即逐段有连续的导函数),则其Fourier级数在整个数轴上一致收敛于$f(x)$ ### 狄利克雷条件 1.可积且绝对可积 2.在任何有限区间内,$x(t)$只有有限个起伏变化。也就是说,在任何单个周期内,$x(t)$最大值和最小值的数目有限。 3.在$x(t)$的任何有限区间内,只有有限个不连续点,而且在这些不连续点上,函数是有限值。 ### Parseval等式 设函数$f(x)\in L^2[-\pi,\pi]$则$f(x)$的Fourier级数部分和$S_n(x)$构成的三角多项式列平方平均收敛于$f(x)$ $$ \sum^{\infty}_{k=-\infty}|a_k|^2=\frac{A_0^2}{2}+\sum^\infty_{k=1}(B_k^2+C_k^2)=\frac1{\pi}\int^\pi_{-\pi}f^2(x)dx $$ ## 3.4连续信号傅里叶级数性质 ### 线性性Linearity: if $x(t)$ and $y(t)$ are periodic signals with the same period $T$,then $$ \begin{gathered} x(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k \\ z(t)=A x(t)+B y(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} c_k=A a_k+B b_k \end{gathered} $$ Proof: $$ \begin{aligned} a_k & =\frac{1}{T} \int_T x(t) e^{-j k \omega_0 t} d t, \quad b_k=\frac{1}{T} \int_T y(t) e^{-j k \omega_0 t} d t \\ c_k & =\frac{1}{T} \int_T z(t) e^{-j k \omega_0 t} d t=\frac{1}{T} \int_T(A x(t)+B y(t)) e^{-j k \omega_0 t} d t \\ & =\frac{A}{T} \int_T x(t) e^{-j k \omega_0 t} d t+\frac{B}{T} \int_T y(t) e^{-j k \omega_0 t} d t=A a_k+B b_k \end{aligned} $$ ### 时移性Time shifting: if $x(t)$ is a periodic signal with the same period $T$, $$ \begin{aligned} x(t) &\stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k \\ x\left(t-t_0\right) &\stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} e^{-j k \omega_0 t_0} a_k \\ \end{aligned} $$ Proof: $$ \begin{aligned} t-t_0 & =\tau \\ \frac{1}{T} \int_T x\left(t-t_0\right) e^{-j k \omega_0 t} d t & =\frac{1}{T} \int_T x(\tau) e^{-j k \omega_0\left(\tau+t_0\right)} d \tau \\ & =e^{-j k \omega_0 t_0} \frac{1}{T} \int_T x(\tau) e^{-j k \omega_0 \tau} d \tau \\ & =e^{-j k \omega_0 t_0} a_k \end{aligned} $$ ### 时间取反Time reversal: if $x(t)$ is a periodic signal with the same period $T$ $$ x(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k \\ y(t)=x(-t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} b_k=a_{-k} $$ proof: $$ \begin{aligned} x(t)=\sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 t} \Rightarrow x(-t) & =\sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0(-t)}=\sum_{k=-\infty}^{\infty} a_k e^{j(-k) \omega_0 t} \\ & =\sum_{m=-\infty}^{\infty} a_{-m} e^{j m \omega_0 t} \end{aligned} $$ 特例:If $x(t)$ even, $a_{-k}=a_k$, if $x(t)$ odd, $a_{-k}=-a_k$ ### 时间尺度变换Time scaling if $x(t)$ is a periodic signal with the same period $T$, Proof: $$ x(t)=\sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 t} \Rightarrow x(\alpha t)=\sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 \alpha t}=\sum_{k=-\infty}^{\infty} a_k e^{j k\left(\alpha \omega_0\right) t} $$ 傅里叶级数系数不变,基波角频率改变 Multiplication: if $x(t)$ and $y(t)$ are periodic signals with the same period $T$, $$ x(t) \stackrel{\mathcal{F S}}{\longleftrightarrow} a_k \quad y(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} b_k\\ z(t)=x(t) y(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} h_k=\sum_{l=-\infty}^{\infty} a_l b_{k-l} $$ Proof: $$ \begin{aligned} x(t) y(t)&=\sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 t} \sum_{n=-\infty}^{\infty} b_n e^{j n \omega_0 t}=\sum_{k=-\infty}^{\infty} \sum_{n=-\infty}^{\infty} a_k b_n e^{j(k+n) \omega_0 t}\\ & =\sum_{k=-\infty}^{\infty} \sum_{l=-\infty}^{\infty} a_k b_{l-k} e^{j l \omega_0 t}=\sum_{l=-\infty}^{\infty} \sum_{k=-\infty}^{\infty} a_k b_{l-k} e_{h_l}^{j l \omega_0 t}=\sum_{l=-\infty}^{\infty} h_l e^{j l \omega_0 t} \\ & \end{aligned} $$ ### 共轭和共轭对称性质 if $x(t)$ is a periodic signal with the same period $T$ $$ \begin{gathered} & x(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k \\ & z(t)=x^*(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} b_k=a_{-k}^* \\ & \end{gathered} $$ proof: $$ x(t)=\sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 t} \quad \therefore x^*(t)=\sum_{k=-\infty}^{\infty} a_k^* e^{-j k \omega_0 t}=\sum_{m=-\infty}^{\infty} a_{-m}^* e^{j m \omega_0 t} $$ ### 频域平移: if $x(t)$ is a periodic signal with the same period $T$ $$ \begin{gathered} & x(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k \\ & e^{j M \omega_0 t} x(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_{k-M} \\ \end{gathered} $$ Proof: $$ \begin{aligned} e^{j M \omega_0 t} x(t)=e^{j M \omega_0 t} \sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 t} & =\sum_{k=-\infty}^{\infty} a_k e^{j(k+M) \omega_0 t} \\ k+M=l & =\sum_{l=-\infty}^{\infty} a_{l-M} e^{j l \omega_0 t} \end{aligned} $$ ### 时域上的周期卷积 $$ x(t) \stackrel{\mathcal{F S}}{\longleftrightarrow} a_k \quad y(t) \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} b_k\\ \int_T x(\tau) y(t-\tau) d \tau \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} T a_k b_k $$ Proof: $$ \begin{aligned} & \int_T x(\tau) y(t-\tau) d \tau=\int_T \sum_{k=-\infty}^{\infty} a_k e^{j k \omega_0 \tau} \sum_{n=-\infty}^{\infty} b_n e^{j n \omega_0(t-\tau)} d \tau \\ = & \int_T \sum_{k=-\infty}^{\infty} \sum_{n=-\infty}^{\infty} a_k e^{j k \omega_0 \tau} b_n e^{-j n \omega_0 \tau} e^{j n \omega_0 t} d \tau \\ = & \sum_{k=-\infty}^{\infty} a_k \sum_{n=-\infty}^{\infty} e^{j n \omega_0 t} b_n \int_T e^{j k \omega_0 \tau} e^{-j n \omega_0 \tau} d \tau=\sum_{k=-\infty}^{\infty} T a_k b_k e^{j k \omega_0 t} \end{aligned} $$ ### 时域微分和积分 - Differentiation and Integration: if $x(t)$ is a periodic signal with the same period $T$ $$ \begin{gathered} x(t) \stackrel{\mathcal{FS}}\longleftrightarrow a_k \\ \frac{dx(t)}{dt} \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} j k \omega_0 a_k \quad \int_{-\infty}^t x(\tau) d \tau \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} \frac{a_k}{j k \omega_0} \end{gathered} $$ - Proof: $$ \begin{gathered} \frac{d x(t)}{d t}=\sum_{k=-\infty}^{\infty} a_k \frac{d\left(e^{j k \omega_0 t}\right)}{d t}=\sum_{k=-\infty}^{\infty} a_k j k \omega_0 e^{j k \omega_0 t} \\ \int_{-\infty}^t x(\tau) d \tau=\sum_{k=-\infty}^{\infty} a_k \int_{-\infty}^t e^{j k \omega_0 \tau} d \tau=\sum_{k=-\infty}^{\infty} \frac{a_k}{j k \omega_0} e^{j k \omega_0 t} \end{gathered} $$ ## 3.5离散信号的傅里叶级数表示 ### 3.5.1成谐波关系的复指数信号的线性组合 $$ x[n]=x[n+N] $$ 就是一个周期为$N$的周期信号。 于是成谐波关系的 $$ \phi_k[n]=e^{jk\omega_0 t}=e^{jk(\frac{2\pi}N)n},k=0,\pm 1,\pm 2\cdots $$ 与连续时间信号不同的是,因为n和k一定是整数(而离散时间里面的t不一定是) 导致$k'=k+rN$时(r是整数) $$ \phi_{k'}[n]=e^{jk'\omega_0 t}=e^{j(k+rN)(\frac{2\pi}N)n}=e^{jk(\frac{2\pi}N)n}e^{jr2\pi n}=e^{jk(\frac{2\pi}N)n}=\phi_{k}[n] $$ 即 $$ \phi_{k+rN}[n]=\phi_{k}[n] $$ 所以我们发现不仅仅是n有周期性,k上面也有周期性 由连续时间傅里叶级数: $$ x(t)=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0t} $$ 写离散时间傅里叶级数 $$ x[n]=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega_0n} $$ $k$有周期性,就把求和限表示成$k=\left< N\right>$ $$ x[n]=\sum_{k=<N>}a_ke^{jk\omega_0n} $$ ### 3.5.2傅里叶级数系数的确定 $$ \begin{aligned} x[n] e^{-j r(2 \pi / N) n} & =\sum_{k=\langle N\rangle} a_k e^{j k(2 \pi / N) n} e^{-j r(2 \pi / N) n} \\ \sum_{n=\langle N\rangle} x[n] e^{-j r(2 \pi / N) n} & =\sum_{n=\langle N\rangle} \sum_{k=\langle N\rangle} a_k e^{j k(2 \pi / N) n} e^{-j r(2 \pi / N) n}\\ &=\sum_{k=\langle N\rangle} a_k \sum_{n=\langle N\rangle} e^{j(k-r)(2 \pi / N) n}=N a_r\\ \end{aligned} $$ $$ \therefore a_r=\frac{1}{N} \sum_{n=\langle N\rangle} x[n] e^{-j r(2 \pi / N) n} \rightarrow a_k=\frac{1}{N} \sum_{n=\langle N\rangle} x[n] e^{-j k(2 \pi / N) n} $$ ### 3.5.3离散傅里叶级数对 我们发现离散傅里叶级数和离散傅里叶系数的公式形式相似: #### Theorem: $x[n]$ can be expressed as a Fourier series: $$ x[n]=\sum_{k=\langle N\rangle} a_k e^{j k(2 \pi / N) n} $$ #### 综合公式Synthesis equation $a_k$ is the Fourier Series Coefficient of $x[n]$ obtained by $$ a_k=\frac{1}{N} \sum_{n=\langle N\rangle} x[n] e^{-j k(2 \pi / N) n} $$ #### 分析方程Analysis equation $a_k$ is periodic $$ \begin{aligned} x[n]=\sum_{k=\langle N\rangle} a_k \emptyset_k[n] & =a_0 \emptyset_0[n]+a_1 \emptyset_1[n]+\cdots+a_{N-1} \emptyset_{N-1}[n] \\ & =a_1 \emptyset_1[n]+a_2 \emptyset_2[n]+\cdots+a_N \emptyset_N[n] \\ \therefore a_k=a_{k+r N} & =a_2 \emptyset_2[n]+a_2 \emptyset_2[n]+\cdots+a_{N+1} \emptyset_{N+1}[n] \end{aligned} $$ ### 3.5.4 离散傅里叶级数的性质 If $x[n]$ and $y[n]$ are periodic signals with period $N, a_k$ and $b_k$ are periodic with period $N$. $$ x[n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k \quad y[n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} b_k $$ #### Linearity $$ A x[n]+B y[n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} A a_k+B b_k $$ #### Time Shifting $$ x\left[n-n_0\right] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_k e^{-j k\left(\frac{2 \pi}{N}\right) n_0} $$ #### Frequency Shifting $$ e^{j M\left(\frac{2 \pi}{N}\right) n} x[n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_{k-M} $$ #### Conjugation $$ x^*[n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_{-k}^* $$ #### Time Reversal $$ x[-n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} a_{-k} $$ #### Periodic Convolution $$ \sum_{r=\langle N\rangle} x[r] y[n-r] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} N a_k b_k $$ #### Multiplication $$ x[n] y[n] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow} \sum_{l=\langle N\rangle} a_l b_{k-l} $$ #### First difference $$ x[n]-x[n-1] \stackrel{\mathcal{F} \mathcal{S}}{\longleftrightarrow}\left(1-e^{j k(2 \pi / N)}\right) a_k $$ #### Parseval's relation $$ \frac{1}{N} \sum_{l=\langle N\rangle}|x[n]|^2=\sum_{l=\langle N\rangle}\left|a_k\right|^2 $$ # Lecture 4 连续时间傅里叶变换 ## 傅里叶积分公式 把傅里叶级数的$2\pi$周期延拓到整个数轴,得到傅里叶积分 若函数$f(t)$满足狄利克雷条件,且在$(-\infty,+\infty)$上绝对可积,则$f(t)$可表示傅里叶积分的形式,且当$t$为$f(t)$的连续点时 $$ \frac{1}{2\pi}\int^{+\infty}_{-\infty}[\int^{+\infty}_{-\infty}f(\tau)e^{-j\omega \tau}d\tau]e^{j\omega t}d\omega=f(t) $$ 当$t$为$f(t)$间断点时 $$ \frac{1}{2\pi}\int^{+\infty}_{-\infty}[\int^{+\infty}_{-\infty}f(\tau)e^{-j\omega \tau}d\tau]e^{j\omega t}d\omega=f(t)=\frac{f(t+0)+f(t-0)}{2} $$ ### 傅里叶积分的三角形式 $$ \frac{1}{2\pi}\int^{+\infty}_{-\infty}[\int^{+\infty}_{-\infty}[f(\tau)\cos \omega (t-\tau )d\tau ]d\omega=f(t) $$ 和差化积后 $$ f(t)=\int^{+\infty}_{0}[A(\omega)\cos \omega t+B(\omega)\sin \omega t]d\omega $$ 其中 $$ A(\omega)=\frac{1}{\pi}\int^{+\infty}_{-\infty}f(\tau)\cos \omega \tau d\tau\\ B(\omega)=\frac{1}{\pi}\int^{+\infty}_{-\infty}f(\tau)\sin \omega \tau d\tau $$ #### 特殊情况 奇函数 $$ A(\omega)=0\\ B(\omega)=\frac{2}{\pi}\int^{+\infty}_{0}f(\tau)\sin \omega \tau d\tau $$ 偶函数 $$ A(\omega)=\frac{2}{\pi}\int^{+\infty}_{0}f(\tau)\cos \omega \tau d\tau\\ B(\omega)=0 $$ ## 傅里叶变换 $$ F(w)=\int^{+\infty}_{-\infty}f(t)e^{-j\omega t}dt $$ ### 傅里叶逆变换 $$ f(t)=\frac{1}{2\pi}\int^\infty_{-\infty}F(w)e^{jwt}dw $$ ## 广义傅里叶变换 常义下的定义,广义上的计算 常义下 $$ f(t)=\begin{cases} 1&,t=0\\ 0&,t\neq 0 \end{cases} $$ $i(t)=\frac{df(t)}{dt}$无意义在$x=0$处 形式求导 $$ f'(0)=\lim_{\Delta t\rightarrow 0}\frac{f(0+\Delta t)-f(0)}{\Delta t}=\infty $$ 广义定义 $$ f_{\varepsilon}=\begin{cases} \frac1{2\varepsilon}&|t|<\varepsilon\\ 0&|t|\geq \varepsilon \end{cases} $$ 其中 $$ \int_{-\varepsilon}^{\varepsilon}f_{\varepsilon}(t)dt=1 $$ ### 定义:狄拉克函数$\delta(t)$ $$ \delta_{\varepsilon}=\begin{cases} \frac1{2\varepsilon}&|t|<\varepsilon\\ 0&|t|\geq \varepsilon \end{cases} $$ ### 狄拉克函数的性质 #### 1.挑选性 $$ \int^{\infty}_{-\infty}f(x)\delta(x)dx=f(0) $$ #### 2.存在n阶导数,一阶导数为奇函数 而$\delta$函数的$n$阶导数的定义是: 对于任何在$x=0$函数值连续的函数$f(x)$,有 $$ \int^{\infty}_{-\infty}f(x)\delta^{(n)}(x)=-f^{(n)}(0) $$ ### 定义:单位阶跃函数$u(t)$ $$ u(t)=\begin{cases} 0&,t<0\\ 1&,t>0\\ \end{cases} $$ 其中$\delta(t)$是$u(t)$的导函数 ## 傅里叶变换和逆变换的基本性质 ### 性质1.1 线性性 $$ \mathcal{F}[\alpha f(t)+\beta g(t)]=\alpha\mathcal{F}[f(t)]+\beta\mathcal{F}[g(t)]\\ \mathcal{F}^{-1}[\alpha f(t)+\beta g(t)]=\alpha\mathcal{F}^{-1}[f(t)]+\beta\mathcal{F}^{-1}[g(t)] $$ ### 性质1.2 对称性 若 $$ \mathcal{F}[f(t)]=F(\omega) $$ 则 $$ \mathcal{F}[F(t)]=2\pi f(-\omega) $$ ### 性质1.3延迟性 $$ \mathcal{F}[f(t-t_0)]=e^{-i\omega t_0}F(\omega)\\ \mathcal{F}^{-1}[F(\omega-\omega_0)]=e^{i\omega_0t}f(t) $$ $$ \mathcal{F}^{-1}[e^{-i\omega t_0}F(\omega)]=f(t-t_0)\\ \mathcal{F}(e^{i\omega_0t}f(t))=F(\omega-\omega_0) $$ ### 性质1.4 相似性 设$\mathcal{F}[f(t)]=F(\omega)$,$a\neq0$则 $$ \mathcal{F}[f(at)]=\frac{1}{|a|}F(\frac{\omega}{a})\\ \mathcal{F}^{-1}[F(a\omega)]=\frac{1}{|a|}f(\frac{t}{a}) $$ #### 合并1.3和1.4得 $$ \mathcal{F}[f(at-t_0)]=\frac{1}{|a|}e^{-i\frac{t_0}{a}\omega}F(\frac{\omega}{a}) $$ ### 性质1.5 微分性 #### 原象函数($f(t)$)的微分性 $$ \mathcal{F}[f'(t)]=i\omega \mathcal{F}[f(t)] $$ 一般地.若$\displaystyle\lim_{|t|\rightarrow+\infty}f^{(k)}(t)=0$,则 $$ \mathcal{F}[f^{(k)}(t)]=(i\omega)^{k}\mathcal{F}[f(t)] $$ 推论: $$ \mathcal F^{-1}[i\omega F(\omega)]=(\mathcal F^{-1}(F(\omega))'\\ \mathcal F^{-1}[(i\omega)^k F(\omega)]=(F^{-1}(F(\omega))^{(k)} $$ #### 象函数($f(t)$)的微分性 $$ F'(\omega)=-i\mathcal{F}[tf(t)],\mathcal{F}[tf(t)]=iF'(\omega) $$ 一般情况 $$ F^{(k)}=(-i)^k\mathcal{F}[t^kf(t)],\mathcal{F}[t^kf(t)]=i^kF^{(k)}(\omega) $$ ### 积分性 $$ \mathcal{F}[\int^{t}_{-\infty}f(\tau)d\tau]=\frac1{i\omega}\mathcal F(f(t))\\ \mathcal{F}^{-1}[\frac{1}{i\omega }F(\omega)]=\int^{t}_{-\infty}f(\tau)d\tau $$ ### 卷积性 > $$ > \mathcal{F}[f(t)*g(t)]=\int^{\infty}_{-\infty}f(t)*g(t)e^{-iwt}dt\\ > =\int^{\infty}_{-\infty}[\int^\infty_{-\infty}f(\tau)g(t-\tau)d\tau]e^{-iwt}dt\\ > =\int^{\infty}_{-\infty}[\int^\infty_{-\infty}f(\tau)g(t-\tau)e^{-iwt}dt]d\tau\\ > =\int^{\infty}_{-\infty}f(\tau)[\int^\infty_{-\infty}g(t-\tau)e^{-iwt}dt]d\tau\\ > $$ > > 记$t-\tau=s$ > > $$ > =\int^{\infty}_{-\infty}f(\tau)e^{-iwt}[\int^\infty_{-\infty}g(s)e^{-iws}ds]d\tau\\ > =\int^{\infty}_{-\infty}f(\tau)[\mathcal{F}(g(t))]d\tau\\ > =\mathcal{F}(f(t))\mathcal{F}(g(t)) > $$ #### 时域上的卷积定理 $$ \mathcal{F}[f(t)*g(t)]=\mathcal{F}(f(t))\mathcal{F}(g(t)) $$ #### 频域上的卷积定理 $$ \mathcal{F}^{-1}[F(\omega)*G(\omega)]=2\pi f(t)g(t) $$ #### 实信号性质 - 共轭对称性 $$ x(t) \stackrel{\mathcal{F}}{\longleftrightarrow} X(j \omega) \longleftrightarrow x^*(t) \stackrel{\mathcal{F}}{\longleftrightarrow} X^*(-j \omega) $$ - 如果$f(t)$是实信号 $$ F(-\omega)=F^*(\omega) \Longleftrightarrow \begin{aligned} & \mathcal{R} e\{F(\omega)\}=\mathcal{R} e\{F(- \omega)\} \\ & \mathcal{J} m\{F(\omega)\}=-\mathcal{J} m\{F(-\omega)\} \end{aligned} $$ $$ \begin{aligned} & x(t)=x_e(t)+x_o(t) \\ & \mathcal{F}\{x(t)\}=\mathcal{F}\left\{x_e(t)\right\}+\mathcal{F}\left\{x_o(t)\right\} \\ \end{aligned} \Longleftrightarrow \begin{aligned}\mathcal{O} d\{x(t)\}\stackrel{\mathcal{F}}{\longleftrightarrow} j \mathcal{J} m\{X(j \omega)\}\\\mathcal{E} v\{x(t)\} \stackrel{\mathcal{F}}{\longleftrightarrow} \mathcal{R} e\{X(j \omega)\}\end{aligned} $$ 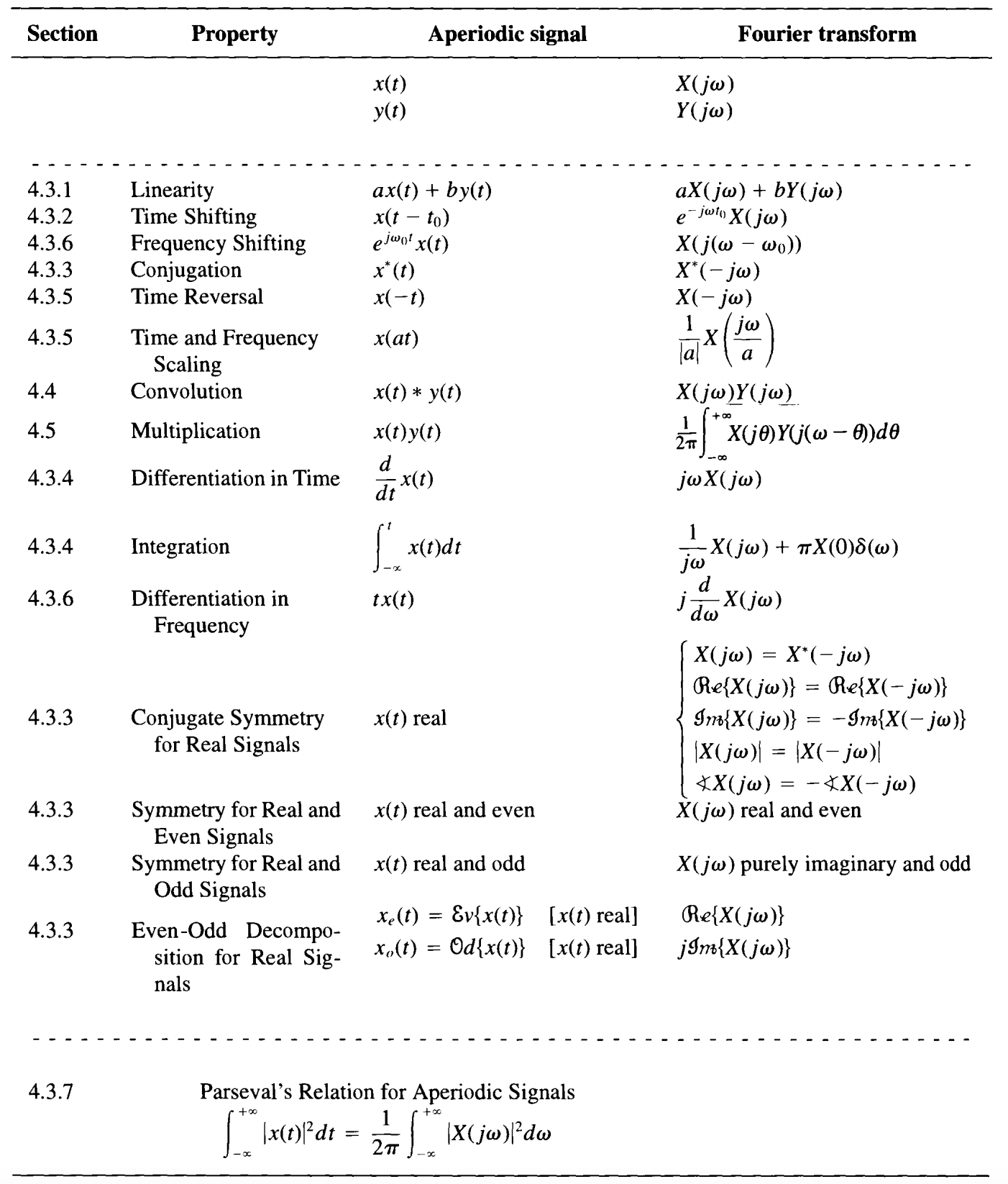 ## 傅里叶变换表 | $f(t)$ | $F(\omega)$ | | -------------------- | ----------------------------------------------------------------------------------------------------------------------- | | $e^{-at}u(t)$ | $\displaystyle\frac{1}{a+j\omega}$ | | $te^{-at}u(t)$ | $\displaystyle\frac{1}{(a+j\omega)^2}$ | | $ | t | | $\delta (t)$ | $1$ | | $1$ | $2\pi \delta(\omega)$ | | $u(t)$ | $\pi\delta (\omega)+\frac{1}{jw}$ | | $\cos\omega_0 tu(t)$ | $\displaystyle\frac{\pi}{2}[\delta(\omega-\omega_0)+\delta(\omega+\omega_0)]+\frac{j\omega}{w^2_0-\omega^2}F(\omega)$ | | $\sin\omega_0 tu(t)$ | $\displaystyle\frac{\pi}{j2}[\delta(\omega-\omega_0)-\delta(\omega+\omega_0)]+\frac{\omega_0}{w^2_0-\omega^2}F(\omega)$ | | $\cos \omega_0 t$ | $\pi[\delta(\omega-\omega_0)+\delta(\omega+\omega_0)]$ | | $\sin\omega_0 t$ | $j\pi [\delta(\omega+\omega_0)-\delta(\omega-\omega_0)]$ | 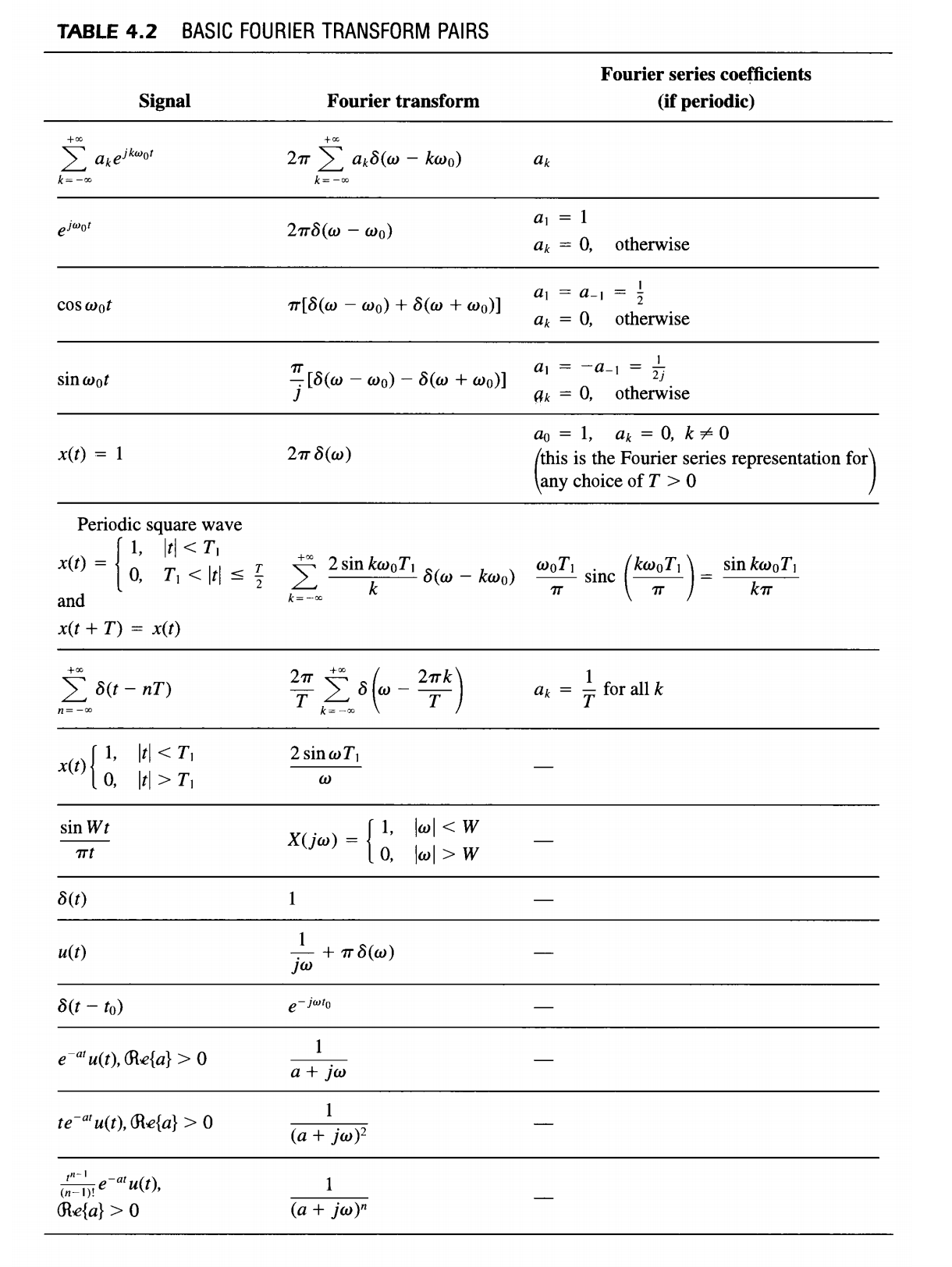 # Lecture 5 离散傅里叶变换 (回顾)傅里叶级数 - $x(t)=\sum^{\infty}_{k=-\infty}a_ke^{jk\omega t},a_k=\frac{1}{T_0}\int_{T_0}x(t)e^{-jk\omega t}dt$ - $x[n]=\sum^\infty_{k=-\infty}a_ke^{j\omega kn },a_k=\frac{1}{N}{\sum_{k=\left <N \right >}}x[n]e^{-j\omega k n}$ ### 离散时间的响应: 设$x[n]=z^n$,其中$z=e^{j\omega}$是复数 $$ y[n]= h[n]*x[n] \\=\sum^{\infty}_{k=-\infty}h[k]x[n-k]\\ =\sum^{\infty}_{k=-\infty}h[k]z^{n-k}\\ =z^n\sum^{\infty}_{k=-\infty}h[k]z^{-k} $$ $\displaystyle H(z)=\sum^{\infty}_{k=-\infty}h[k]z^{-k},x[n]=\sum_ka_k z_k^n$ $$ y[n]=\sum_{k}a_kH(z_k)z^n $$ 其中$z=e^{j\omega}$ 对于某一给定的$z_k$值,常数$H(z_k)$就是与特征函数$e^{jw}$有关的特征值 ## 离散傅里叶变换 由傅里叶级数$\displaystyle \widetilde x[n]=\sum_{k=\left < N \right >}a_ke^{j\omega_0 kn },a_k=\frac{1}{N_0}{\sum_{n=\left < N \right >}}\widetilde x[n]e^{-j\omega_0 k n}$ 若信号$x[n]$是$\widetilde x[n]$的一个周期,则 $$ x[n]=\sum_{k=\left < N \right >}a_ke^{j\omega_0 kn },a_k=\frac{1}{N_0}{\sum_{n=-\infty}^{\infty}}x[n]e^{-j\omega_0 k n} $$ 令$\displaystyle X(jw)={\sum_{n=-\infty}^{\infty}}x[n]e^{-j\omega_0 k n}$ $$ x[n]=\sum_{k=\left < N \right >}\frac{1}{N_0}X(j\omega)e^{j\omega_0 k n} $$ 而$\omega_0 = \frac{2\pi}{N_0}\Rightarrow N_0=\frac{2\pi}{\omega_0}$ $$ x[n]=\sum_{k=\left < N \right >}\frac{1}{2\pi}X(j\omega)e^{j\omega_0 k n}\omega $$ 随着$N_0\rightarrow \infty,\omega_0\rightarrow 0$ $$ x[n]=\frac1{2\pi}\int_{2\pi}X(j\omega)e^{j\omega n}d\omega $$ $$ \displaystyle X(jw)={\sum_{n=-\infty}^{\infty}}x[n]e^{-j\omega n} $$ note:在频域上连续且$\omega\in C [-\pi,\pi]$,在时域上离散且$n\in(-\infty,+\infty)$ ## 离散傅里叶变换的性质 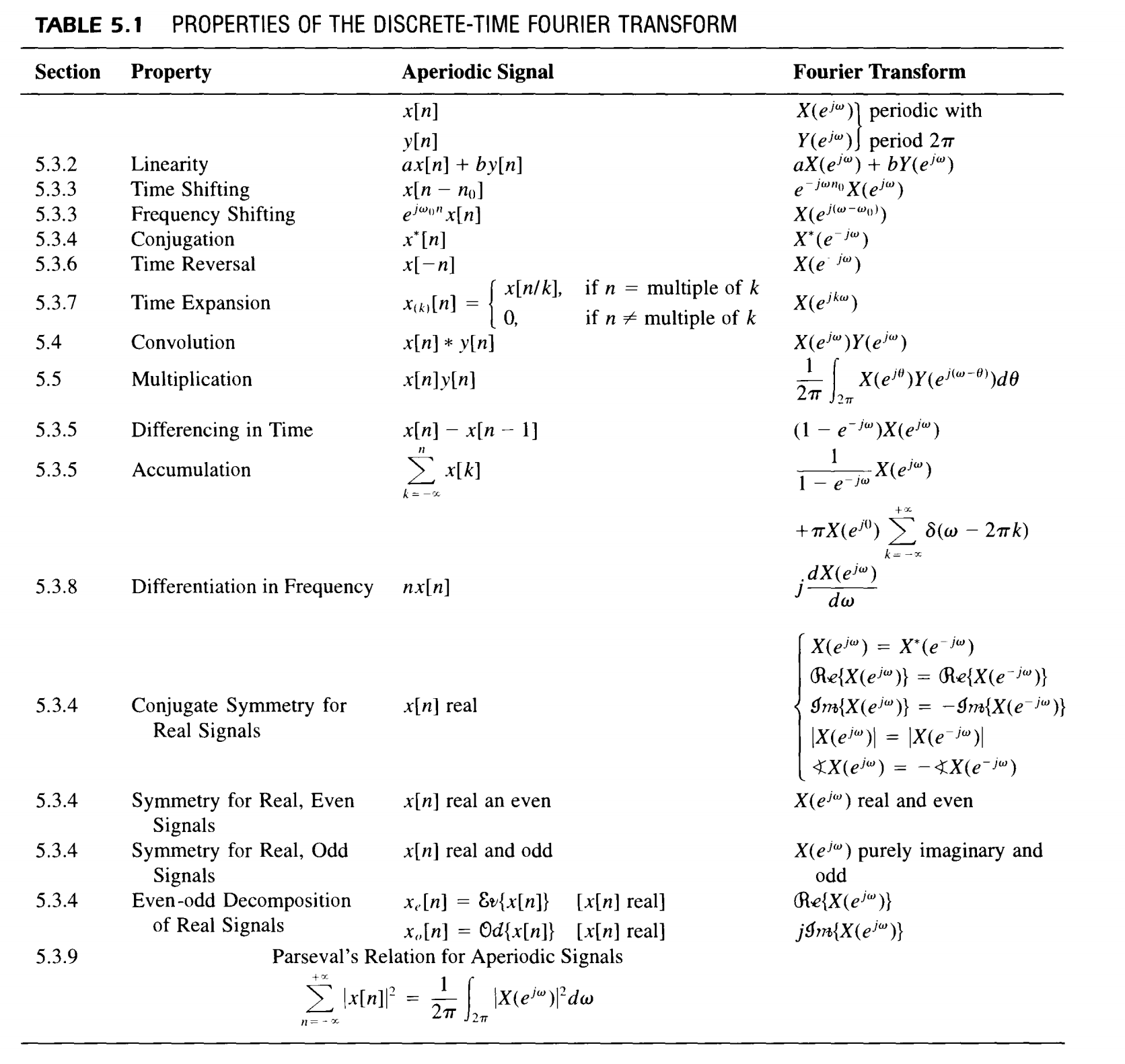  ## 离散傅立叶变换和连续傅里叶级数的对偶性质 $$ \begin{aligned} x[n] & =\frac{1}{2 \pi} \int_{2 \pi} X\left(e^{j \omega}\right) e^{j \omega n} d \omega, \\ X\left(e^{j \omega}\right) & =\sum_{n=-\infty}^{+\infty} x[n] e^{-j \omega n}, \\ x(t) & =\sum_{k=-\infty}^{+\infty} a_k e^{j k \omega_0 t}, \\ a_k & =\frac{1}{T} \int_T x(t) e^{-j k \omega_0 t} d t . \end{aligned} $$  # Lecture 7 采样 ## 7.1用信号样本表示连续时间信号:采样定理 如果一个信号是带限的(频域有界),如果采样频率足够大(和最高频率有关),对于固定采样频率,这些样本值就能**唯一**地用来表征这一信号,而且能从这些样本中把**信号完全恢复出来** ### 7.1.1冲激串响应 $x(t)$是连续时间信号 $p(t)$是采样函数,$p(t)$的基波频率$\omega_s=\frac{2\pi}{T}$称为采样频率 $x_p(t)=x(t)p(t)$ 其中 $$ p(t)=\sum^{+\infty}_{n=-\infty}\delta(t-nT) $$ 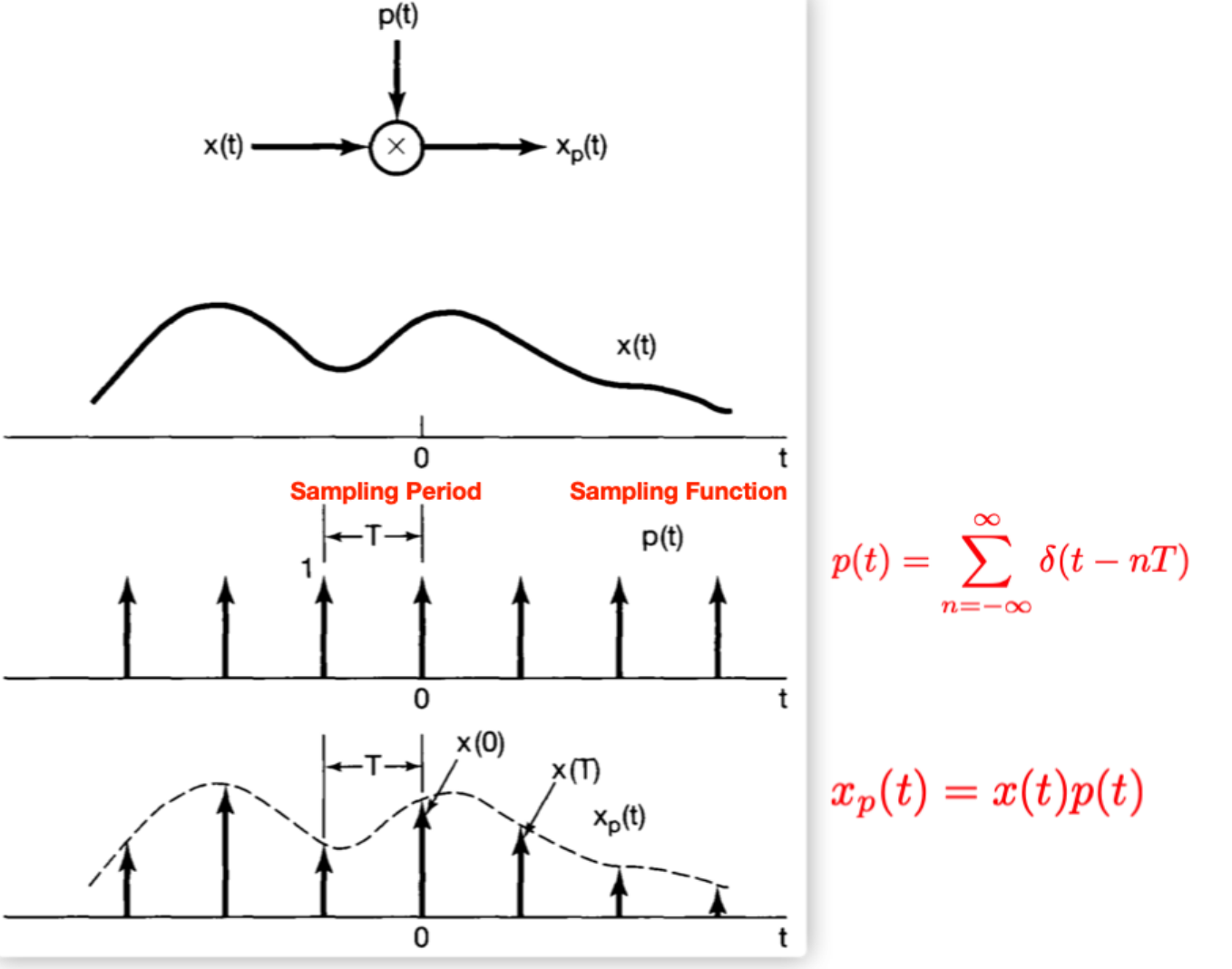 $$ x_p(t)=\sum_{n=-\infty}^{\infty} x(n T) \delta(t-n T)\\ =x(t)\sum^{\infty}_{n=-\infty}\delta(t-nT) \\ 注意这个形式不是卷积 $$ 由卷积定理 $$ X_p(j \omega)=\frac{1}{2 \pi}[X(j \omega) * P(j \omega)] $$ where $$ P(j \omega)=\frac{2 \pi}{T} \sum_{k=-\infty}^{\infty} \delta\left(\omega-k \omega_s\right) $$ $$ X_p(j \omega)=\frac{1}{T}[X(j\omega) *\sum_{k=-\infty}^{\infty} \delta\left(\omega-k \omega_s\right)] $$ 我们知道信号与一个单位冲激函数的卷积是该信号的移位 $$ X(j\omega)*\delta(\omega-\omega_0)=X(j(\omega-\omega_0)) $$ $$ X_p(j \omega)=\frac{1}{T} \sum_{k=-\infty}^{\infty} X\left(j\left(\omega-k \omega_s\right)\right) $$ 注意:以上的傅里叶变换都是连续时间的傅里叶变换 ### 采样定理证明 对于一个带限的信号$x(t)$,我们简化这个信号的频域是$X(jw)$如下图 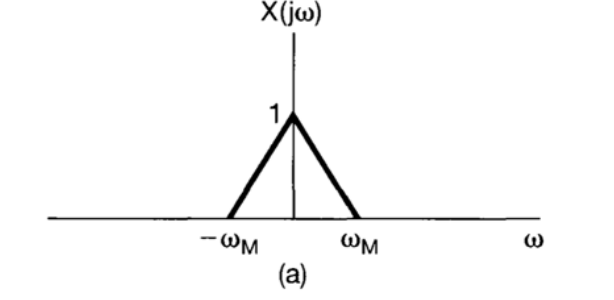 由$X_p(j \omega)=\frac{1}{T} \sum_{k=-\infty}^{\infty} X\left(j\left(\omega-k \omega_s\right)\right)$  如果有$\omega_S-\omega_M>\omega_M$ 那么就能用一个低通滤波器从$X_p(j\omega)$恢复$X(j\omega)$ 否则  无法恢复原信号的全部信息 ### 完整采样定理 设$x(t)$是一个带限信号在$|\omega|>\omega_M$时,$X(j\omega)=0$,如果$\omega_s>2\omega_M$其中$\omega_s=\frac{2\pi}{T}$,那么$x(t)$就唯一由其样本$x(nT)$所确定 其中$2\omega_M$被称为**奈奎斯特速率** $\omega_M$被称为**奈奎斯特频率** ## 零阶保持采样  产生输出窄而幅度大的脉冲是很难的事情,以零阶保持的方法来产生采样信号往往更方便一些  在计算的时候,先冲激串采样,再用一个矩形信号$h_0(t)$进行卷积 $$ H_0(j \omega)=e^{-j \omega T / 2}\left[\frac{2 \sin (\omega T / 2)}{\omega}\right] $$ $$ X_0(j\omega)=X_p(j \omega)H_0(j\omega)=\frac{1}{T} \sum_{k=-\infty}^{\infty} X\left(j\left(\omega-k \omega_s\right)\right)e^{-j \omega T / 2}\left[\frac{2 \sin (\omega T / 2)}{\omega}\right] $$ 可以用一个特殊低通滤波器恢复信号 滤波器的单位冲激响应是: $$ H_r(j \omega)=\frac{e^{j \omega T / 2} H(j \omega)}{\frac{2 \sin (\omega T / 2)}{\omega}} $$  ## 7.4连续时间的离散信号处理 建立一个模型: 1.模数转换器(采样) 2.处理器(数字信号处理) 3.数模转换器(反采样) ### 模数转换器 先确定一个采样频率$\omega_s$和对应的周期$T=\frac{2\pi}{\omega_s}$ $$ x_d[n]=x_c(nT) $$ ### 离散时间信号处理 $$ \mathcal T\{x_d[n]\}=y[n] $$ ### 数模转换器 $$ y_d[n]=y_c(nT) $$ # Lecture 8 拉普拉斯变换 ## 8.1 拉普拉斯变换 已知一个$e^{st}$的复指数信号的响应$y(t)$是: $$ y(t)=H(s)e^{st} $$ $s$为纯虚数的时候,$H(s)$是$h(t)$的傅里叶变换 一个信号的拉普拉斯变换定义如下: $$ X(s)=\int^{\infty}_{-\infty}x(t)e^{-st}dt\\ =\int^{\infty}_{-\infty}x(t)e^{-(\sigma+j\omega)t}dt\\=\mathcal F[x(t)e^{-\sigma t}] $$ 也就是$x(t)e^{-\sigma t}$的傅立叶变换 ## 8.2拉普拉斯变换收敛域 ### 定理8.2.1 $X(s)$的收敛域在$s$平面内是平行于$j\omega$的带状区域组成的 ### 定理8.2.2 对于有理拉普拉斯变换来说,收敛域不包含任何极点 ### 定理8.2.3 $x(t)$是有限信号且绝对可积的,那么收敛域就是整个s平面 ### 定理8.2.4 如果$x(t)$是右边信号,并且$\mathcal {Re}|s|=\sigma_0$这条线在收敛域内,则$\mathcal{Re}|s|>\sigma_0$的全部$s$都在收敛域内 ### 定理8.2.5 如果$x(t)$是左边信号,并且$\mathcal {Re}|s|=\sigma_0$这条线在收敛域内,则$\mathcal{Re}|s|<\sigma_0$的全部$s$都在收敛域内 ### 定理8.2.6 如果$x(t)$是双边信号,并且$\mathcal {Re}|s|=\sigma_0$这条线在收敛域内,则收敛域由平面内一条带状区域组成,直线$\mathcal{Re}\{s\}=\sigma_0$位于该区域中 ### 定理8.2.7 若$X(s)$是有理函数,那么它的收敛域是被极点所界定的或延伸到无限远,且不包含任何极点 ### 定理8.2.8 若$X(s)$是有理函数,那么它的收敛域在最右边极点的右边(右边信号),或者是最左边极点的左边(左边信号) ## 8.3拉普拉斯逆变换 $$ \mathcal{L}^{-1}[F(p)]=f(t)=\frac{1}{2\pi}\int^{\infty}_{-\infty}F(\sigma+i\omega)e^{\sigma+i\omega}d\omega\\=\frac{1}{2\pi i}\int^{\sigma+i\infty}_{\sigma-i\infty}F(p)e^{pt}dp $$ 积分路径$(\sigma-i\infty,\sigma+i\infty)$为$Re(p)>\sigma_0$内任一条平行于虚轴的直线 ### 利用留数定理求原象函数 #### 定理8.3.1 设$F(p)=\mathcal{L}[f(t)]$若$F(p)$在全平面上只有有限个奇点$p_1,p_2,\cdots,p_n$,它们均位于直线$Re(p)=\sigma>\sigma_0$的左侧,且$\lim_{p\rightarrow \infty}F(p)=0$ $$ \mathcal{L}^{-1}[F(p)]=f(t)=\sum^n_{k=1}Res[F(p)e^{pt},p_k] $$ <img src="https://heaticy-1310163554.cos.ap-shanghai.myqcloud.com/markdown/image-20221215152540673.png" alt="image-20221215152540673" style="zoom:50%;" style=""> 例: 求 $F(p)=\frac{1+e^{-2p}}{p^2}=\frac{1}{p^2}+\frac{1}{p^2}e^{-2p}$ M1: $$ \mathcal{L}^{-1}[F(p)]=t+(t-2)u(t-2)=2t-2 $$ M2: 对于$F(p)=\frac{1+e^{-2p}}{p^2}\Rightarrow p=0是它的二阶极点$ $$ Res[F(p)e^{pt},0]=\lim_{p\rightarrow0}\frac{d}{dp}[1+e^{-2p}e^{pt}]\\ =\lim_{p\rightarrow 0}[-2e^{-2p}e^{pt}+t(1+e^{-2p})]\\ =-2+2t $$ 例 求$F(p)=\frac{p+1}{9p^2+6p+5}$的拉普拉斯逆变换 M1: $$ F(p)=\frac{p+1}{9p^2+6p+5}=\frac{1}{9}\frac{p+\frac13+\frac{2}{3}}{(p+\frac{1}{3})^2+\frac{2}{3}} $$ M2(留数定理): 极点:$9p^2+6p+5=0\Rightarrow p=-\frac{1}{3}\pm \frac{2}{3}i$ $$ F(p)=\frac{p+1}{9[p-(-\frac{1}{3}+\frac{2}{3}i)][p-(-\frac{1}{3}-\frac{2}{3}i)]} $$ $$ \lim_{p\rightarrow-\frac{1}{3}+\frac{2}{3}i}\frac{(p+1)e^{pt}}{9(p-(-\frac{1}{3}-\frac{2}{3}i))}+\lim_{p\rightarrow-\frac{1}{3}-\frac{2}{3}i}\frac{(p+1)e^{pt}}{9(p-(-\frac{1}{3}+\frac{2}{3}i))} $$ ## 利用卷积拉普拉斯逆变换 $$ F(p)=\frac{1}{p^2(1+p^2)} $$ $$ F(p)=\frac{1}{p^2}\frac{1}{p^2+1}\\ \mathcal{L}^{-1}[F(p)]=\mathcal L^{-1}[\frac{1}{p^2}]*\mathcal L^{-1}[\frac{1}{p^2+1}]\\ =t*\sin t\\ =\int^t _0(t-\tau)\sin t d\tau\\ =t-\sin t $$  ## 8.4拉普拉斯变换的性质  | | 时域f(t)变换 | 频域F(S)变换 | | -------- | ----------------------------------------------------------------------------- | ----------------------------------------------------- | | 线性变换 | $\mathcal L[a_1f_1(t)+a_2f_2(t)]=a_1F_1(S)+a_2F_2(S)$ | $a_1F_1(S)+a_2F_2(S)=\mathcal L[a_1f_1(t)+a_2f_2(t)]$ | | 求导 | $\mathcal L[\frac d {dt}f(t)]=SF(s)-f(0^-)\\$ | $F'(S)=-\mathcal{L}[tf(t)]$ | | 连续求导 | $\mathcal L[\frac {d^n}{dt^n}d(t)]=S^nF(S)-\sum^n_{k=0}s^kf^{(n-1-k)}(0^-)\\$ | $F^{(n)}=(-1)^n\mathcal L[t^nf(t)]$ | | 积分 | $\mathcal L[\int^t_0f(t)dt]=\frac{1}{S}F(S)$ | $\int^\infty_SF(S)=\mathcal L[\frac{f(t)}dt]$ | | 平移 | $\displaystyle \mathcal L[f(t-\tau)]=e^{-s\tau}F(S)(\tau>0)$ | $F(s+a)=\mathcal L[e^{-at}f(t)]$ | | 缩放 | $\displaystyle\mathcal{L}[f(at)]=\frac{1}{a}F(\frac{s}{a})$ | $F(aS)=\mathcal L[\frac1af(\frac ta)]$ | ### 含有ln的拉普拉斯逆变换 例 求$F(p)=\ln \frac{p+1}{p-1}$ $$ F(p)=\ln(p+1)-\ln(p-1)\\ F'(p)=\frac{1}{p+1}-\frac{1}{p-1}\\ \mathcal{L}^{-1}[F'(p)]=\frac{1}{t}(e^{-t}-e^t)=\frac{2\sin ht}{t} $$ ### 分段函数的拉普拉斯变换 例:求分段函数 $$ f(t)=\begin{cases} 0,&t<0\\ t,&0\leq t\leq 1\\ 3-t,&2\leq t<3\\ 0,&t\geq 3 \end{cases} $$ 的拉普拉斯变换 $$ F(p)=\mathcal{L}[tu(t)-(t-1)u(t-1)-(t-2)u(t-2)+(t-3)u(t-3)]\\ =\frac{1}{p^2}(1-e^{-p}-e^{-2p}+e^{-3p}) $$ ## 8.5拉普拉斯变换和线性时不变系统 $$ Y(s)=H(s)X(s) $$ 此时,$H(s)$是该系统的特征函数或传递函数 ### 8.5.1因果性 因果系统的单位冲激响应一定在$t<0$时候为0,因此一定是个右边信号,根据定理8.2.4,我们能推出下面的定理 #### 定理8.5.1.1 一个因果系统的系统函数的收敛域是某个右半平面 又根据定理8.2.8,有下面的定理 #### 定理8.5.1.2 对于一个有理函数系统来说,系统的因果性就等效于收敛域位于最右边极点的右边的右半平面 ### 8.5.2系统的稳定性 一个线性时不变的系统的稳定信等效于它的单位冲激响应是绝对可积的 #### 定理8.5.2.1 **当且仅当**$H(s)$包括$j\omega$轴的时候即$Re\{s\}=0$时,一个线性时不变系统是稳定的 结合定理8.2.8,有下面推论 #### 定理8.5.2.2 当且仅当$H(s)$的全部极点都位于$s$平面的左半平面时,一个有理函数的$H(s)$的因果系统才是稳定的 ## 单边拉普拉斯变换及其性质 $$ X(s)=\int^{\infty}_{0^-}x(t)e^{-st}dt $$  ## 利用单边拉普拉斯变换解微分方程 例:求微分方程$\begin{cases} y(0)=0,y'(0)=1\\ y''(t)-y(t)=e^{-2t} \end{cases}$ $$ \mathcal{L}[y''(t)]=p^2y(p)-py(0)-y'(0)=p^2y(p)-1\\ \mathcal{L}[e^{-2t}]=\frac{1}{p+2} $$ $$ \mathcal{L}[y''(t)]-\mathcal{L}[y(t)]=\mathcal{L}[e^{-2t}] $$ $$ y(p)=\mathcal{L}^{-1}[\frac{p+3}{(p+2)(p^2-1)}] $$ 待定系数法 $$ \frac{p+3}{(p+2)(p^2-1)}=\frac{Ap+B}{p^2-1}+\frac{C}{p+2}=\frac{Ap^2+2Ap+Bp+2B+Cp^2-C}{(p^2-1)(p+2)} $$ $$ \begin{cases} 2A+B=1\\ 2B-C=3\\ A+C=0 \end{cases}\Rightarrow \begin{cases} A=-\frac{1}{3}\\ B=-\frac{5}{3}\\ C=\frac{1}{3} \end{cases} $$ $$ y(p)=\mathcal{L}^{-1}[\frac{5}{3}\frac{1}{p^2-1}-\frac{1}{3}\frac{p}{p^2-1}+\frac{1}{3}\frac{1}{p+2}]\\ =\frac{5}{3}\sinh t-\cosh t+\frac{1}{3}e^{-2t} $$ | | 时域f(t)变换 | 频域F(S)变换 | | -------- | ----------------------------------------------------------------------------- | ----------------------------------------------------- | | 线性变换 | $\mathcal L[a_1f_1(t)+a_2f_2(t)]=a_1F_1(S)+a_2F_2(S)$ | $a_1F_1(S)+a_2F_2(S)=\mathcal L[a_1f_1(t)+a_2f_2(t)]$ | | 求导 | $\mathcal L[\frac d {dt}f(t)]=SF(s)-f(0^-)\\$ | $F'(S)=-\mathcal{L}[tf(t)]$ | | 连续求导 | $\mathcal L[\frac {d^n}{dt^n}d(t)]=S^nF(S)-\sum^n_{k=0}s^kf^{(n-1-k)}(0^-)\\$ | $F^{(n)}=(-1)^n\mathcal L[t^nf(t)]$ | | 积分 | $\mathcal L[\int^t_0f(t)dt]=\frac{1}{S}F(S)$ | $\int^\infty_SF(S)=\mathcal L[\frac{f(t)}dt]$ | | 平移 | $\displaystyle \mathcal L[f(t-\tau)]=e^{-s\tau}F(S)(\tau>0)$ | $F(s+a)=\mathcal L[e^{-at}f(t)]$ | | 缩放 | $\displaystyle\mathcal{L}[f(at)]=\frac{1}{a}F(\frac{s}{a})$ | $F(aS)=\mathcal L[\frac1af(\frac ta)]$ | # Lecture 9 Z变换 ## 9.1 Z变换 $$ y[n]=H(z)z^n $$ 其中 $$ H(z)=\sum^{\infty}_{n=-\infty}h[n]z^{-n} $$ 若$z=e^{jw}$,$\omega$是实数,则求和式是离散时间傅立叶变换 ### 9.2 z变换的收敛域 #### 定理9.2.1 $X(z)$的收敛域是在z平面内以原点为中心的圆环 #### 定理9.2.2 收敛域内不包括任何极点 #### 定理9.2.3 如果$x[n]$是有限长序列,那么收敛域是整个z平面,可能除去$z=0$或$z=\infty$ #### 定理9.2.4 如果$x[n]$是右边序列,并且$|z|=r_0$的圆位于收敛域内,那么$|z|>r_0$的全部有限$z$值都一定在该收敛域内 #### 定理9.2.5 如果$x[n]$是左边序列,并且$|z|=r_0$的圆位于收敛域内,那么$0<|z|<r_0$的全部$z$值都一定在该收敛域内 #### 定理9.2.6 如果$x[n]$是双边序列,并且$|z|=r_0$的圆位于收敛域内,那么该收敛域在$z$域中一定是包含$|z|=r_0$这一圆环的 #### 定理9.2.7 如果$x[n]$的z变换$X(z)$是有理的,它的收敛域就被极点所界定,或延伸无限远 #### 定理9.2.8 如果$x[n]$的z变换$X(z)$是有理的,而且$x[n]$是右边序列,那么收敛域就位于$z$平面最外层极点的外边,也就是半径等于$X(z)$极点中最大模值的圈的外边,而且,若$x[n]$是因果序列,即$x[n]$为$n<0$时等于0的右边序列,那么收敛域也包括$z=\infty$ ## Z变换的性质  <img src="https://heaticy-1310163554.cos.ap-shanghai.myqcloud.com/markdown/image-20230602135743149.png" alt="image-20230602135743149" style="zoom:50%;" style=""> ### 9.5.1因果性 因果系统的单位冲激响应一定在$t<0$时候为0,因此一定是个右边信号,根据定理8.2.4,我们能推出下面的定理 #### 定理9.5.1.1 对于一个离散时间线性时不变系统系统,它的系统函数的收敛域位于某个圆的外边且包括无穷远点时,该系统就是因果的 #### 定理9.5.1.2 对于一个有理函数系统是因果的当且仅当(a)收敛域位于最外层极点某个圆的外边;并且(b)若$H(z)$表示成z的多项式之比,其分子的阶次不能高于分母的阶次 ### 9.5.2系统的稳定性 一个线性时不变的系统的稳定信等效于它的单位冲激响应是绝对可积的 #### 定理9.5.2.1 **当且仅当**$H(s)$包括单位圆的的时候即$|z|=1$时,一个离散时间线性时不变系统是稳定的。 #### 定理9.5.2.2 当且仅当$H(s)$的全部极点都位于单位圆以内时,一个有理函数的$H(s)$的因果系统才是稳定的 最后修改:2023 年 08 月 30 日 © 允许规范转载 打赏 赞赏作者 支付宝微信 赞 如果觉得我的文章对你有用,请随意赞赏
